JR西日本の自動運転バス「2歩前進」どんな内容?

東広島市で実証実験中のJR西日本の自動運転バス(記者撮影)
全国各地で「レベル4」自動運転バスの営業運行が続々と始まっている。レベル4とは5段階に分かれる自動運転レベルのうち、完全な自動運転を意味するレベル5の一歩手前の段階だ。
【図と写真を見る】▶どんなルートを走る?▶東広島市で実証実験中のJR西日本の自動運転バス▶「1つで乗用車1台相当」という価格のセンサーやカメラを取り付けたEVバスや情報を映し出す車内モニターなど、公道での自動運転中の様子
場所、天候、速度などの特定条件下においてシステムがすべての運転操作を行うというもので、運転手が不要な「ドライバーフリー」が実現するため、レベル4での営業運転は運転手不足解消の決定打として期待されている。
鉄道会社の自動運転バス
これまでに松山市(愛媛県)、日立市(茨城県)でレベル4自動運転による営業運行が行われており、1月13日には柏市(千葉県)で柏の葉キャンパス駅―東京大学柏キャンパス間のうち約700mの一般道で始まった。
また、将来の営業運転を目指したレベル4自動運転の実証実験が各地で行われているほか、レベル4予備軍として、ドライバーが運転操作の主体であるものの、システムが自動で車線変更したり、ブレーキをかけたりするなど高度な運転支援を行うレベル2自動運転の実証実験を行っている地域が数多くある。
JR西日本も自動運転バスの実用化に意欲的な1社だ。他社と違うのは複数台の自動運転バスが連なって、バス専用道などを走ることで定時性・速達性を実現する「自動運転・隊列走行BRT」も見据えていることだ。大量輸送にも適した隊列走行は鉄道会社ならではの発想といえる。
実現への本気度は野洲市(滋賀県)に総延長1.1kmのテストコースを建設したことからもうかがえる。中古車両を改造して2021年10月に実証実験を開始した。翌年10月には、テストコース内を連節バス、大型バス、小型バスの3台が連なって走行する様子は報道公開された。それは新時代の交通システムを予感させるものだった。
このとき、「2023年度中に技術を確立し、2020年代半ばの社会実装を目指す」と担当者が話していた。無人のテストコースと実際の道路では走行条件がまるで違う。安全を最優先とした取り組みだけに無数の課題を1つずつクリアしながら慎重に次のステップに進む。

3台のバスが連なって走る自動運転・隊列走行バスの実証実験の様子=2022年(記者撮影)
公道での走行実験は東広島市で
公道での走行実験場所として東広島市(広島県)が手を挙げた。市はJR西条駅と広島大学を結ぶ「ブールバール」と呼ばれる4車線の道路にバス専用レーンやPTPS(公共車両優先システム)を導入して自動運転・隊列走行BRTの事業化を目指す。市とJR西日本の思いが一致した。

東広島市での自動運転バス実証実験ルート(画像:東広島市)
実証実験は市の事業として行われ、市とJR西日本が全体管理と社会実装の検討、東大発のベンチャー企業である先進モビリティが自動運転システムを担当し、ソフトバンクがデータ分析を担い、JR西日本傘下のJRバス中国がテストドライバーを提供するほか、JR西日本とJR西日本コンサルタンツでプロジェクトマネジメントおよび技術開発、実装検討を行うという枠組みだ。西条駅と広島大学を結ぶバスルートでレベル2自動運転の実証実験が2023年11月から始まった。
そして、3年目を迎える2025年11月5日から新たな走行試験が始まった。
ポイントは2つある。第1に、それまでレベル2自動運転を行うのはルートの一部区間に限られていたが、実証実験の範囲が1周12kmのルート全体に拡大されたこと、第2に、そのうちの約500mの区間で2027年度にレベル4自動運転の認可取得を目指すという目標を掲げたことである。
さらに、JR西日本は新たに大型EVバスの新車を2台導入した。車両が代わったことから、隊列走行の実証実験は一時中断。「まずEVバス1台で自動運転について検証し、その後、できるだけ早い時期に隊列走行を再開したい」と、JR西日本でこの事業を担当する奥田貴彬氏が話す。今まで実証実験に使っていた車両の利用方法は「現在検討中」という。

自動運転実証実験に使われる中国BYD製のEVバス(記者撮影)
センサーの価格は「乗用車1台相当」
1月9日、実証実験の様子が報道陣に公開された。中央公園前バス停付近の乗降場所に青く塗装された真新しい車両が姿を見せた。中国の車両メーカーBYDが製造する「K8 2.0」というタイプで、全長約10mの低床構造。静かで揺れの少ない乗り心地から日本でも多くのバス事業者が採用しているという。車体の側面には燕を思わせる白いマークが描かれていた。奥田氏によれば、JRバスのシンボルマークでもある燕マークをベースに「少し先進的なイメージにした」とのことだ。
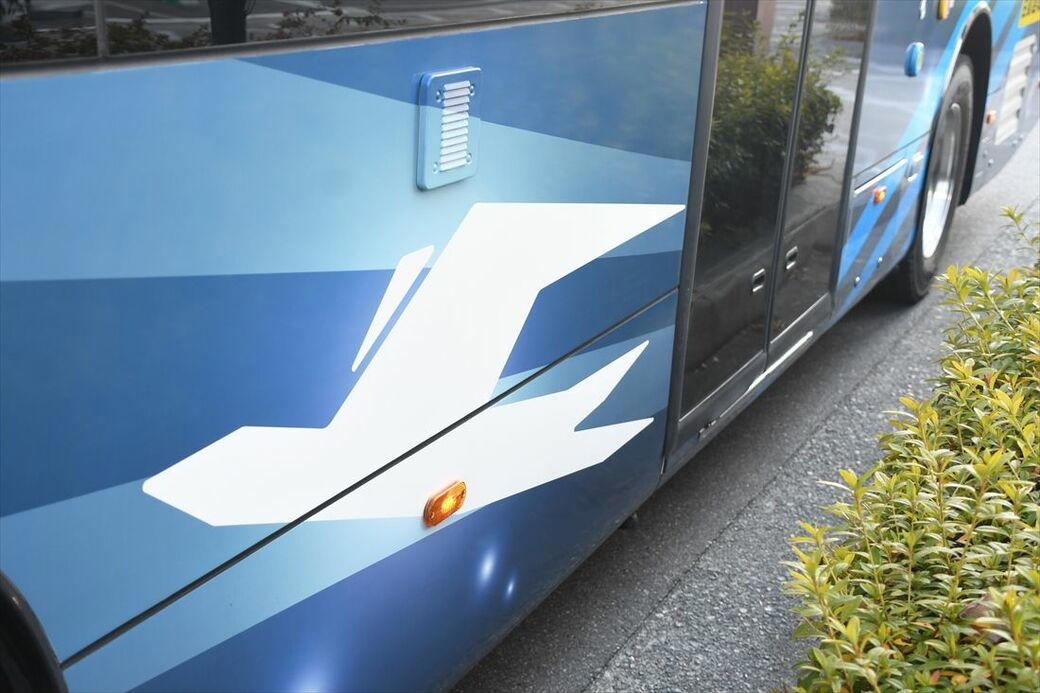
車体の側面に描かれた燕のマーク(記者撮影)
前方の対象物の距離などを感知するLiDARというセンサーやステレオカメラ、GNSS(全球測位衛星システム)アンテナなどが車両の各所に設置されている。「以前よりもセンサーの数を増やしたので、システムとしてグレードアップした」(奥田氏)。その結果、「左折や横断歩道に対する認識性能が向上した」という。
LiDARの価格について尋ねると、JR西日本で次世代モビリティを担当する木村光男課長は「非公表」としながらも、「1つのLiDARの価格は乗用車1台の価格に相当する。いわばバスの前後左右に車をつけて走っているようなもの」と話した。
バスに乗り込むと運転席の後ろにモニター類が設置されていた。ここにLiDARやカメラが検知した映像や情報が映し出される。また、GNSSによって数cmレベルの誤差で自己位置を推定し、3次元地図の上に映し出される。

バス車体に搭載されたLiDARとカメラ(記者撮影)
バスは13時37分に出発し、まず西条駅に向かい、駅前のロータリーを旋回した。これまでの実証実験では手動運転だったが、今回は自動運転。多数の人や車が行き交う中、時速8km程度でゆっくりと走行する。ドライバーが手を触れていないのにハンドルがするすると回る。前方に歩行者がやってくるとバスは自動で停車、歩行者が横断したのを確認した後に動き出した。

バス車内のモニターに映し出された映像や情報(記者撮影)
赤信号はカメラで検知
ロータリーを離れると、中央分離帯がある4車線の広い道路を走る。時速35km。モニターには目標速度も表示されており、想定どおりに走行していることがわかる。モニターのカメラ画像には前方の車や歩道を歩く歩行者などが映し出され、AIによる解析で、それが障害となるかどうかが判定される。たとえば歩道の植え込みも車道側にはみ出しすぎると障害物と認識されてしまうため、事前にしっかりと刈り込んだという。
交差点の赤信号でバスは停車した。自動運転バスには信号機と連携して、信号の情報をシステムに取り込んで運転する機能もあるが、「この技術はすでに確立したことが確認できたので、今回は採用せず、カメラが信号機の色を検知して制御している」という。
一部の信号では運転手が手動でブレーキをかけた。直前で赤信号になったためだという。ちょっと急ブレーキ気味に感じた。信号連携を行えばこうした問題は起きないが、画像認識でどのように対応できるか、これからデータを蓄積して解決していくのだろう。
立体交差の近くなど、ほかの構造物が障害となり電波が弱くなってGNSSが機能しにくくなる場所では、カメラで周辺の環境を認識して自己位置を推定するSLAM(スラム)という技術が使われる。モニターにもSLAMで自己位置を推定していると表示される。

カメラで周辺環境を認識して自車の位置を推定する「SLAM」を使用して自動運転中。車内モニターにも表示される(記者撮影)
まもなくバスは速度を落とし、停止した。鏡山公園入口バス停である。後方からやってきた車をやり過ごし、再び発車した。こうした一連の流れはシステムが制御しているが、運転手も念のため後方の安全を確認していた。
ここから池ノ上学生宿舎前バス停までの約500mの往路がレベル4自動運転の認可取得を目指す区間だ。往路のみとした理由は、歩行者と自動車の分離環境が整っているなど、市のBRT導入において検討されているバス専用レーンの構造に近しい区間だからだという。
「レーンチェンジ」が可能に
「広大前交番」という表示のある交差点を直進し、広大中央口バス停を経て次の交差点(下見7丁目)で左折。その後は左折を繰り返し反時計回りで大学周辺をぐるりと回って、最後に右折してブールバールに戻る。これは通常のバスルートと同じで、従来の実証実験では時計回りだった。この区間も手動運転から自動運転に変更した。

自動運転中の様子。運転手はハンドルから手を離している(記者撮影)
この理由は西条駅発の路線バスが走る左車線が広大前交番の交差点直前で左折専用ルートになるため、交差点を直進するためには右側に車線変更する必要があるが、「今まではレーンチェンジの技術を検証していなかった」(奥田氏)。このため、左折専用レーンになった後もそのまま走行して左折した後は右折を繰り返す時計回りの手動運転でブールバールに戻っていたという。
段階的に自動運転技術を確認検証する中で「レーンチェンジする技術が検証できた」(奥田氏)。センサーの増設で左折の認識性能も向上した。そこで広島大学の周囲も路線バスと同様のルートで自動運転が可能になったわけだ。
広大中央口バス停で小休止し、車両の外観に関する説明が行われた後、バスは再び出発。復路も自動運転で走行し、14時17分に元の乗降場所に戻ってきた。往復40分の旅が終わった。運転手が乗車していたとはいえ、ほぼ自動運転で運行していた。これで隊列走行が実現し、バス専用道も設置できればJR西日本と東広島市が目指す未来が実現することになる。
実証実験は1月下旬まで続けられる。その結果を踏まえて8月に鏡山公園入口→池ノ上学生宿舎前のレベル4自動運転の認可が取得できれば、いよいよ自動運転による営業運転の準備に入る。

JR西日本で自動運転バスの事業を担当する奥田貴彬氏(左)と、東広島市交通政策課の帯刀武史氏(右)(記者撮影)
「完全ドライバーレス」はまだ先
自動運転システムを備えるバスは限られているため、すべての本数でレベル4自動運転を行うというわけにはいかない。このバス路線は広電グループの芸陽バスも運行しているため、両者間で運行ダイヤを協議する必要もある。
そもそも、この区間でのレベル4自動運転が実現したとしても効果は薄い。運転手が不要になる区間はわずか500m。前後のレベル2自動運転の区間では運転手が乗車するので、その500mだけ運転手が運転席から離れるということはないだろう。運転手ゼロにするためには全区間をレベル4自動運転にする必要がある。
今回の試乗でも途中の道路工事が行われている箇所で手動運転に切り替えて運転するなど、運転手の出番があった。完全ドライバーレスを実現するためには実証実験を繰り返して、あらゆる事態をシステムで制御できるだけの経験値を積み重ねていく必要がある。